"未来已来为什么这个仿人机器人需要四只手臂
ⓘ Orbit Robotics
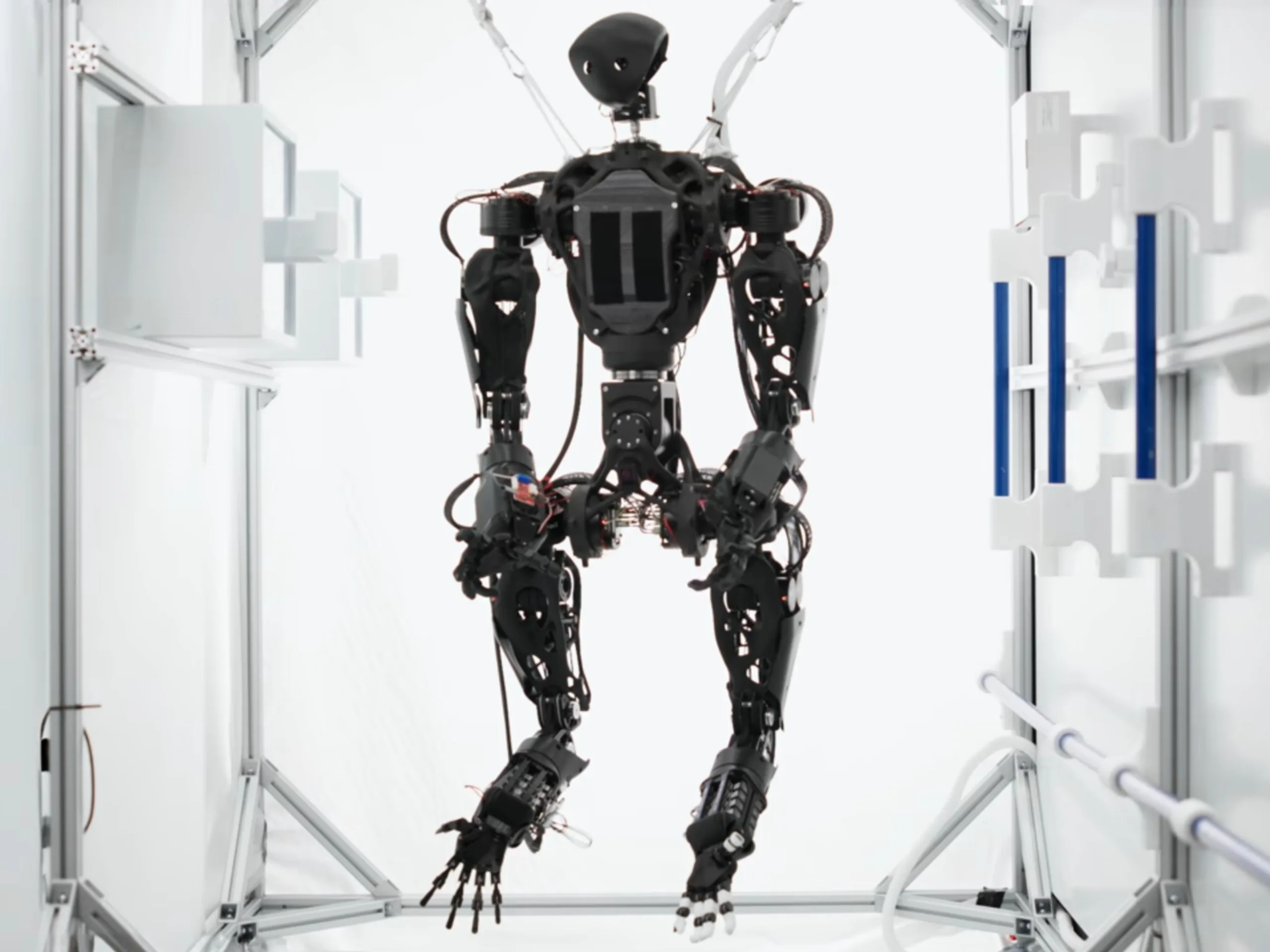
2026 年 5 月 21 日,瑞士联邦理工学院重点项目 ORBIT 机器人公司发布了其 Helios 模型。配套视频的标题是"未来已来"--这样的描述让人觉得非常贴切。与Tesla 的 "擎天柱 "或 Unitree 的 "G1 "等知名人形机器人相比,Helios 更具科幻魅力。或Unitree 的 G1,因为它是专门为在太空中使用而开发的。
ORBIT Robotics公司的Helios机器人旨在为未来空间站上的宇航员提供支持。根据该项目大量时间都花在了那些必要但科学价值不高的任务上。这些任务包括货物和库存工作流程,如卸载货物、分拣设备和记录库存水平。据 ORBIT 统计,约 35% 的乘员时间用于维护任务,单次货物卸载周期约为 50 小时,宇航员每小时的人工成本约为 14 万美元。Helios 的设计目的是使太空工作更便宜、更高效。但为什么机器人需要四只手臂呢?
在微重力环境下,手臂比腿更有用
站立和行走只能在重力作用下工作。在微重力状态下,腿几乎没有用处,最多只能用来推开表面。因此,奥比特机器人公司(ORBIT Robotics)干脆用两只额外的手臂取代了人形机器人的双腿,因为这两只手臂在失重或微重力状态下更有用。这样,机器人就能在空间站内部移动,保持位置,同时执行任务。
从技术角度看,"太阳神 "也很有趣。它的双臂不是按照传统方式通过直接放置在关节处的重型电机来移动,而是采用腱驱动设计。电机靠近肩膀,而线轴、电缆和重定向装置将力传递到关节。这样做的目的是使手臂更轻,动作更流畅。肘部的所谓滚动接触关节在其中发挥了重要作用。这种关节的设计兼顾了强度和顺应性--既能满足操作任务的需要,又能进行可控的轻柔运动。
资料来源
轨道机器人通过 YouTube
轨道机器人
Previous article
Humble Bundle 交易提供 10 款《战锤》游戏,每款售价 1 美元Next article
惠普发布新款 15 英寸紧凑型游戏笔记本电脑,配备 180 Hz 显示屏